
SCIENCE TOPICS いま注目の最先端研究・技術探検!
第11回 細胞をつかまえるナノロボットの世界に挑戦 ~東京大学情報理工学研究科 生田幸士教授を訪ねて
「小学生の頃から、手塚治虫の鉄腕アトムに憧れて、将来はロボット研究者になろうと決めていたんですよ」
開口一番、生田先生は医療に役立てるナノロボットの研究をするようになった原点を教えてくれた。
「高校生の頃はロボットの図面ばかり描いていたんだ。ところが大学に進学する1970年代にはまだ大学にはロボット工学などなくて、縁あって大阪大学で金属工学を勉強することになったんです。でも、いろいろ勉強してみると、鉄腕アトムなんて簡単につくれやしないことがわかった。それなら、ロボット技術を発展させて、医療用のサイボーグをつくって病気などで困っている人を助けるような研究をしたいと思うようになったんです。でも当時、最先端のロボット工学を医療分野に応用しようという人は世界でもいなかった。だからぼくがそれをライフワークにしようと決めたわけです」
先生はそれから生物工学科の3年に学士入学し、そこで生物物理や生体工学、生体計測などを吸収し、さらにロボット工学を勉強するため、博士課程は東京工業大学に移った。
「ここではロボットとメディカルエンジニアリングを結びつけた研究をしました。デビュー作は1986年につくったヘビ型のロボットです。大腸ガンを調べるために、肛門からお腹に入れて遠隔操作で動く『能動内視鏡』という医療用機器なんですが、腸を圧迫しないようにできるだけ小さくしなければならない。金属工学の知識を活かして、形状記憶合金を使って電流を制御することで、ヘビのよう体内を動くマシーンを完成させたんですよ」
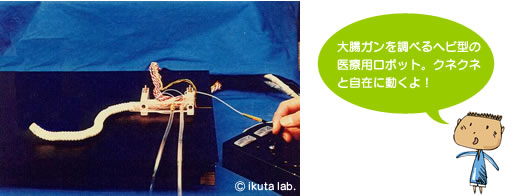
▲ 形状記憶合金製の直径1mmの微小コイルをモーターのかわりのアクチュエータとし、5個の能動屈曲関節からなる。外部から操縦が可能で、大腸内をあたかもヘビが屈曲運動するかのようになめらかに動く。

1977年大阪大学工学部金属材料工学科卒業。97年同大学基礎工学部生物工学専攻卒業。81年同大学院博士前期課程物理系 生物工学専攻修了。87年東京工業大学大学院理工学研究科博士後期課程制御工学専攻修了(工学博士)。同年4月より米国カリフォルニア大学サンタバーバラ校ロボットシステムセンター主任研究員。89年東京大学工学部計数工学科専任講師。90年九州工業大学情報工学部機械システム工学科助教授。94年名古屋大学大学院工学研究科マイクロシステム工学専攻教授。2010年東京大学大学院情報理工学系研究科システム情報学専攻生体医用マイクロシステム講座教授。東大先端科学技術研究センター教授兼務。