月面や深海底から下水道管まで、広がるミミズロボットの応用範囲
中村先生は、こうしたミミズの動きに着目して、「太く短く」「細く長く」という動作を繰り返すパーツをつなげて前進するミミズロボットを開発。プロトタイプをつくってテレビに出演したところ、「こんな使い方はできないか」とあちこちから問い合わせがきたという。先生自身、ただ単に生物をマネたロボットを開発してそれで満足するのではなく、世の中に役立つための応用こそ大切と考えていただけに、さまざまな分野から注目が集まったのは渡りに舟だった。
他分野との共同研究で取り組んでいるものの1つが、JAXAと共同で進めている月・惑星探査用ミミズロボット。これまで月では周回衛星「かぐや」による探査などさまざまな環境調査が行われてきたが、いまだに月の地面を掘削して土を採取する地中探査は行われていない。
というのも、これまで開発されてきた埋設型の掘削ロボットは、ロボットの側面を掘削孔の壁面にこすりながら推進するために土圧の影響を受けやすく、深く掘り進むことができなくなるという問題があった。しかし蠕動運動で動くミミズロボットなら土圧や重力の影響を受けにくく、先端のドリルで土を削ったあと、削った土をロボット内部を通過させて排出しながら地中を掘削していくことができるのだ。
中村研究室が2015年秋に開発した月・惑星探査用ミミズロボットの直径は約13センチメートル、長さが約90センチメートルの円筒形。この円筒の部分が「太く短く」「細く長く」を繰り返しながら掘り進むことで、同じサイズの掘削機としては世界最高深度の約1mの掘削に成功したという。
宇宙と同じ極限環境が深海。海洋研究開発機構との共同研究では、日本近海5000mの海底下を掘削して資源探査を行うミミズロボットの開発に取り組んでいる。
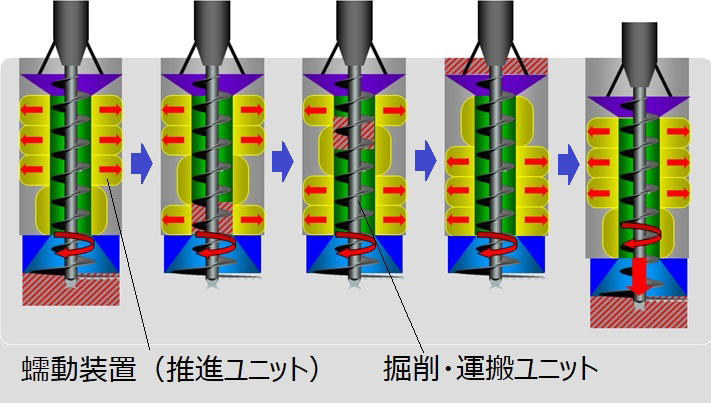
ミミズ型掘削ロボット
ロボットの円筒形の推進部が「太く短く」なり掘削壁面を押し付け、その際の摩擦力によって掘削面への反力と、ドリルの回転を支える。「細く長く」なったときは、壁面との摩擦が小さくなり、重力の影響力を受けることなく掘り進むことができる
図版提供:中村研究室
さらに、国交省からの補助金で現在取り組んでいるのが配管や下水道管検査ミミズロボット。現在、家庭や工場などで水やガスを輸送するために使われている配管の検査には工業用内視鏡が広く使用されているが、内視鏡は細く複雑に入り組んだ管内や長距離配管を検査することが難しい。内視鏡が管内でたわみ、後ろからの押し込む力が前に伝わらなくなることが原因だ。
「そこでミミズロボットを応用した自走機能を持った内視鏡ロボットを開発しました。このロボットなら、ミミズのように、狭く複雑に入り組んだ細管内でも、奥深くまで検査できます。また、この検査用ロボットに毛をつけると管の内側の掃除もしてくれるんです。ダクトの清掃をしながら検査ができるロボットを試作したところうまくいったので、近く実用化をめざしています」
老朽化した下水管は道路の陥没を引き起こす要因ともなっている。配管の内部を検査し、補修や交換の要否をチェックできるロボットの活躍が大いに期待されているのだ。
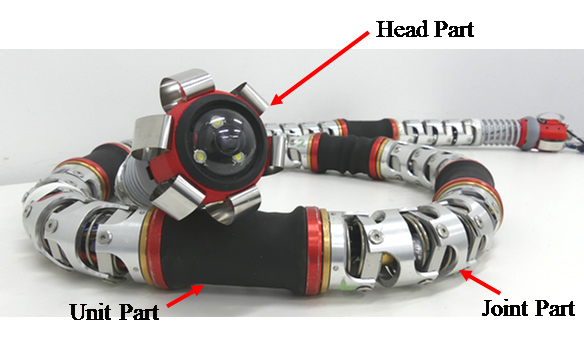
工業検査用ミミズロボット
管内検査用カメラを搭載した先頭部と、7つのユニット部、6つのジョイント部で構成。全長は2800mm。ユニット部が空気圧で収縮・伸長を繰り返して前進する。
写真提供:中村研究室
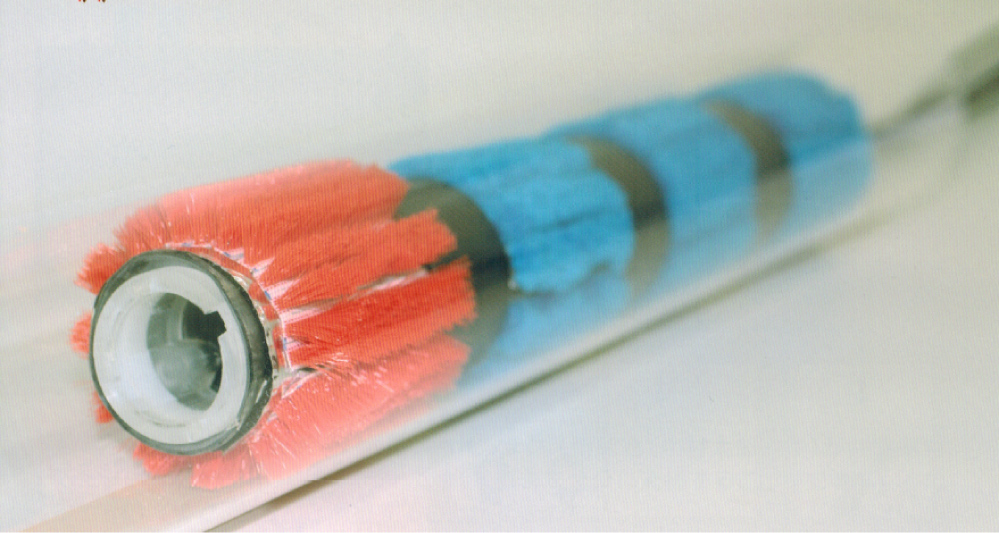
ダクト清掃用ミミズロボット
写真提供:中村研究室
ダクト清掃ミミズロボットの動き
曲がったダクトもへいちゃらなんだよ